BL602 SDK Starter Guide¶
本文档旨在指导用户搭建 BL602 硬件开发的软件环境。
编译环境的建立及代码的获取¶
打开终端,安装make,命令:
sudo apt-get update、sudo apt-get install make
安装串口工具此处选用的
Gtkterm可以执行命令:sudo apt-get install gtkterm安装解压软件,命令:
sudo apt-get install unzip
进入SDK文件所在的目录后开始解压,命令:
cd work、unzip bl_iot_sdk.zip
注意:cd之后的文件名为SDK所在的目录名(如本例中,SDK源文件放在work文件夹下)根据实际情况修改;unzip之后文件名需要根据实际拿到的SDK文件名作出相应的修改
检查源代码解压之后的根目录状态,先用
cd bl_iot_sdk命令进入源文件目录,再用ls命令检查目录状态
硬件连接¶
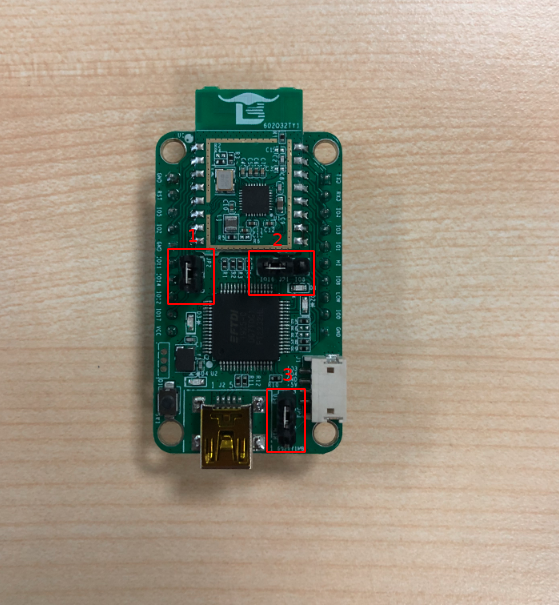
模块的相关引脚连接如下图所示,其中图一是模块的正面图,其标号1处用跳线帽短接,标号2处将左边两根排针短接,标号3处将上面的两根排针短接;图二是模块的背面图,将 IO8 和 LOW 两根排针短接。

代码的编译和烧录¶
进入需要编译的工程目录,命令:
cd customer_app/bl602_demo_event,进行编译,命令./genromap
查看编译生成的build_out文件夹,命令:
ls build_out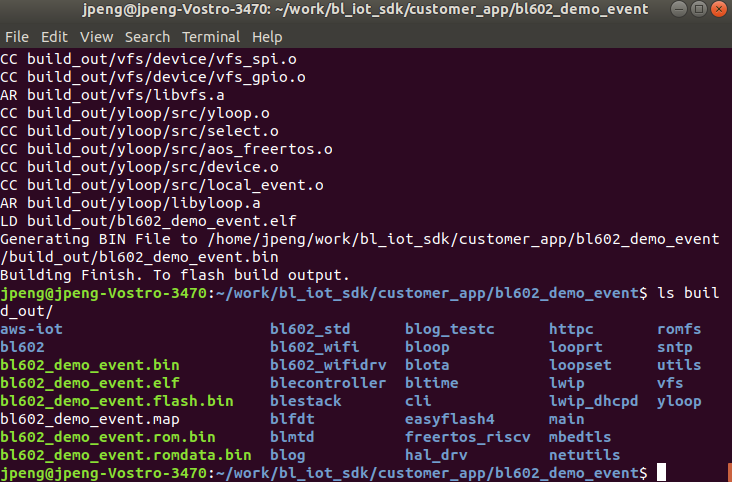
bin文件下载¶
进入
/bl_iot_sdk/tools/flash_tool目录下,双击名为BLFlashEnv的可执行文件 。chip type选择BL602/604,打开后界面参数参考下图配置: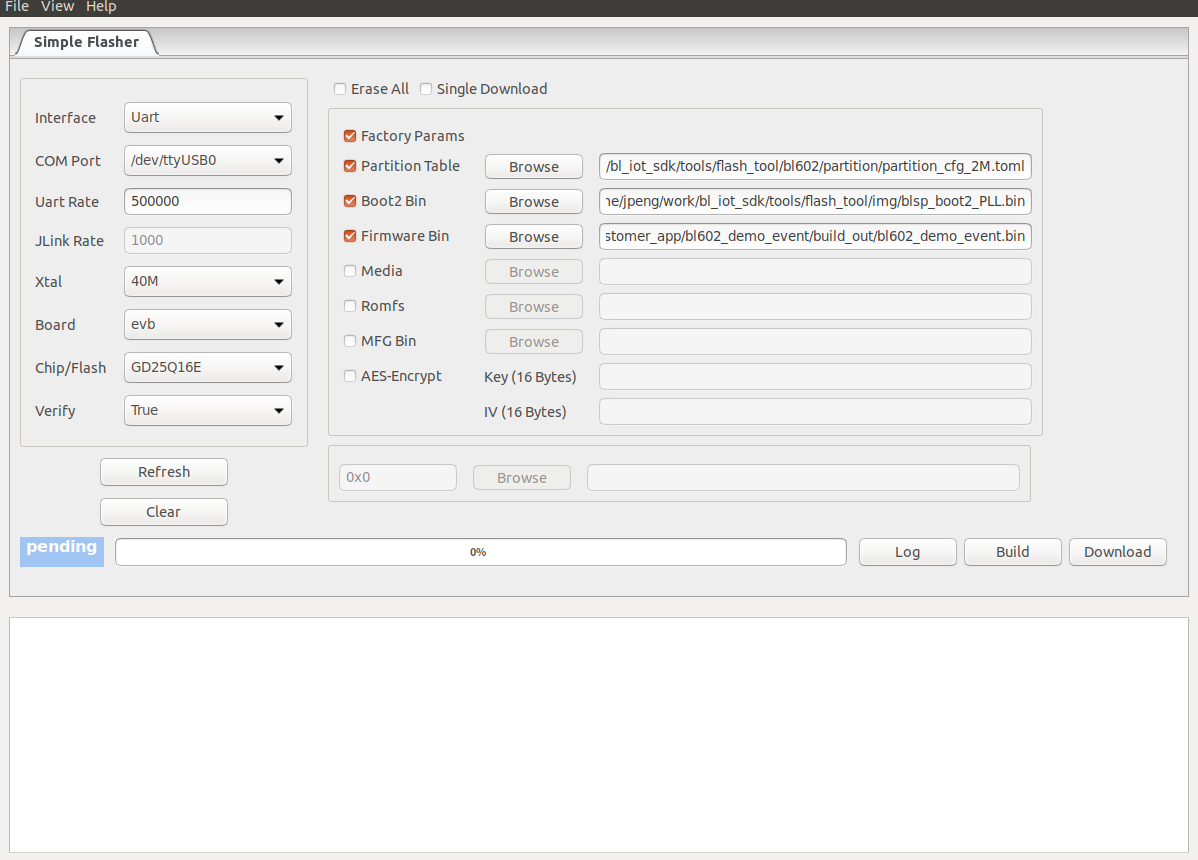
点击
download,出现如下图所示表明下载成功: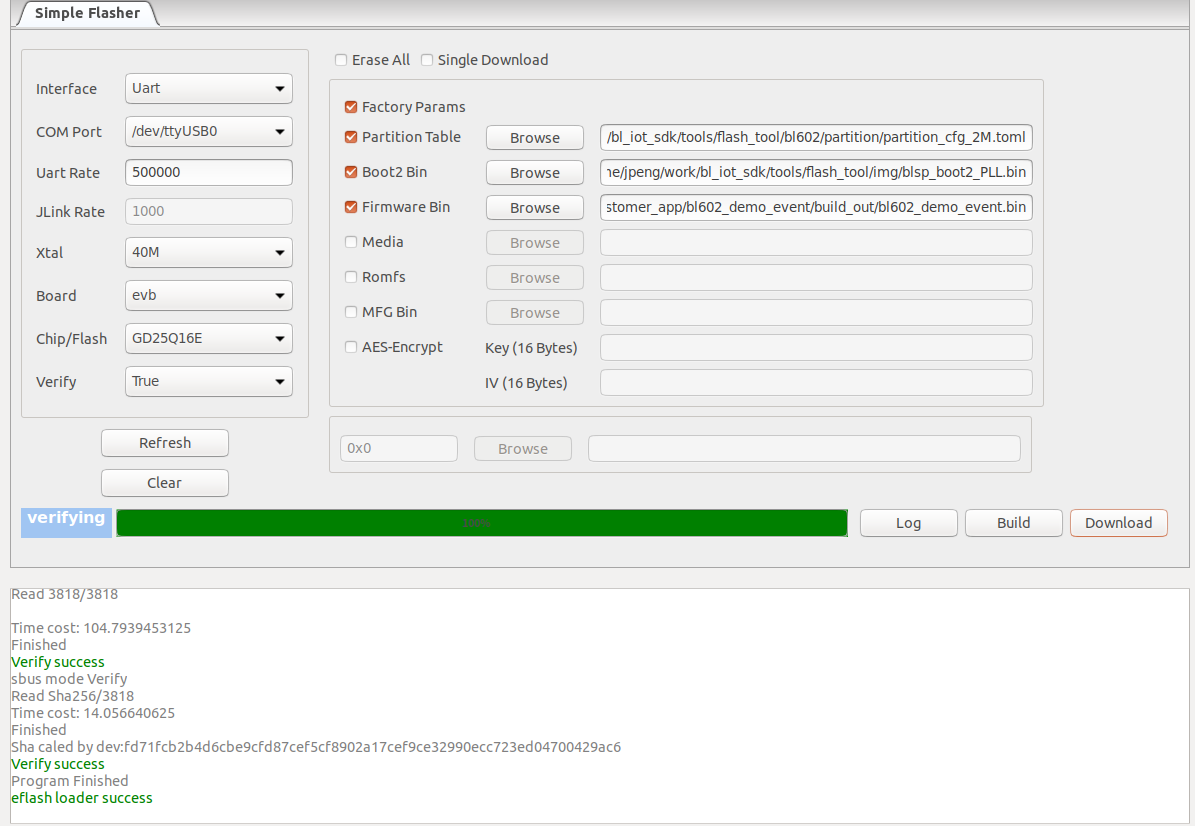
下载完成后,打开串口终端Gtkterm,配置如下:
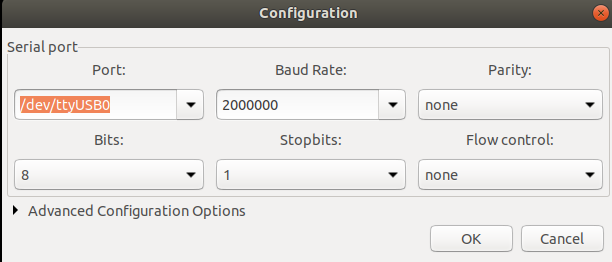
保证终端右下角的DTR是黑色状态, RTS 为灰色状态, DTR 可以通过快捷键 F7 控制, RTS 可以通过快捷键 F8 控制,最终配置如下图所示。
